Damped Oscillator - numba¶
![]()
[1]:
import torch
import pickle
import numpy as np
from tqdm import tqdm
from timeit import timeit
import sbi.utils as utils
import matplotlib.pyplot as plt
from multiprocessing import Pool
from sbi.analysis import pairplot
from vbi.inference import Inference
from sklearn.preprocessing import StandardScaler
from vbi.models.numba.damp_oscillator import DO_nb
[2]:
from vbi import report_cfg
from vbi import extract_features
from vbi import get_features_by_domain, get_features_by_given_names
[3]:
seed = 2
np.random.seed(seed)
torch.manual_seed(seed);
[4]:
params = {
"a": 0.1,
"b": 0.05,
"dt": 0.05,
"t_start": 0,
"method": "heun",
"t_end": 2001.0,
"t_cut": 500,
"output": "output",
"initial_state": [0.5, 1.0],
}
[5]:
if 0:
ode = DO_nb(params)
control = {"a": 0.11, "b": 0.06}
t, x = ode.run(par=control)
plt.figure(figsize=(4, 3))
plt.plot(t, x[:, 0], label="$\\theta$")
plt.plot(t, x[:, 1], label="$\omega$")
plt.xlabel("t")
plt.ylabel("x")
plt.legend()
plt.tight_layout()
plt.show()
[6]:
def func(par):
ode = DO_nb(params)
control = {"a": par[0], "b": par[1]}
t, x = ode.run(par=control)
return x
warm up
[7]:
func([0.1, 0.05])
# timing
number = 1000
t = timeit(lambda: func([0.1, 0.05]), number=number)
print(f"average time for one run: {t / number:.5f} s")
average time for one run: 0.00765 s
[8]:
cfg = get_features_by_domain(domain="statistical")
cfg = get_features_by_given_names(cfg, names=["calc_std", "calc_mean"])
report_cfg(cfg)
Selected features:
------------------
■ Domain: statistical
▢ Function: calc_std
▫ description: Computes the standard deviation of the signal.
▫ function : vbi.feature_extraction.features.calc_std
▫ parameters : {'indices': None, 'verbose': False}
▫ tag : all
▫ use : yes
▢ Function: calc_mean
▫ description: Computes the mean of the signal.
▫ function : vbi.feature_extraction.features.calc_mean
▫ parameters : {'indices': None, 'verbose': False}
▫ tag : all
▫ use : yes
[9]:
def wrapper(params, control, cfg, verbose=False):
ode = DO_nb(params)
t, x = ode.run(par=control)
# extract features
fs = 1.0 / params["dt"] * 1000 # [Hz]
stat_vec = extract_features(
ts=[x.T], cfg=cfg, fs=fs, n_workers=1, verbose=verbose
).values
return stat_vec[0]
[10]:
def batch_run(par, control_list, cfg, n_workers=1):
def update_bar(_):
pbar.update()
stat_vec = []
with Pool(processes=n_workers) as p:
with tqdm(total=len(control_list)) as pbar:
asy_res = [
p.apply_async(wrapper, args=(par, control, cfg), callback=update_bar)
for control in control_list
]
stat_vec = [res.get() for res in asy_res]
return stat_vec
[11]:
control = {"a": 0.11, "b": 0.06}
x_ = wrapper(params, control, cfg)
print(x_)
[4.4408921e-16 2.2204460e-16 1.0530499e+00 8.8416451e-01]
[12]:
num_sim = 2000
num_workers = 10
a_min, a_max = 0.0, 1.0
b_min, b_max = 0.0, 1.0
prior_min = [a_min, b_min]
prior_max = [a_max, b_max]
theta_true = {"a": 0.1, "b": 0.05}
[13]:
prior = utils.torchutils.BoxUniform(
low=torch.as_tensor(prior_min), high=torch.as_tensor(prior_max)
)
[14]:
obj = Inference()
theta = obj.sample_prior(prior, num_sim)
theta_np = theta.numpy().astype(float)
control_list = [{"a": theta_np[i, 0], "b": theta_np[i, 1]} for i in range(num_sim)]
[15]:
stat_vec = batch_run(params, control_list, cfg, n_workers=num_workers)
100%|██████████| 2000/2000 [00:02<00:00, 859.29it/s]
[16]:
scaler = StandardScaler()
stat_vec_st = scaler.fit_transform(np.array(stat_vec))
stat_vec_st = torch.tensor(stat_vec_st, dtype=torch.float32)
torch.save(theta, "output/theta.pt")
torch.save(stat_vec_st, "output/stat_vec_st.pt")
[17]:
theta.shape, stat_vec_st.shape
[17]:
(torch.Size([2000, 2]), torch.Size([2000, 4]))
[18]:
posterior = obj.train(
theta, stat_vec_st, prior, num_threads=8, method="SNPE", density_estimator="maf"
)
Neural network successfully converged after 280 epochs.train Done in 0 hours 0 minutes 37.246640 seconds
[19]:
with open("output/posterior.pkl", "wb") as f:
pickle.dump(posterior, f)
[20]:
# with open("output/posterior.pkl", "rb") as f:
# posterior = pickle.load(f)
[21]:
xo = wrapper(params, theta_true, cfg)
xo_st = scaler.transform(xo.reshape(1, -1))
[22]:
samples = obj.sample_posterior(xo_st, 10000, posterior)
torch.save(samples, "output/samples.pt")
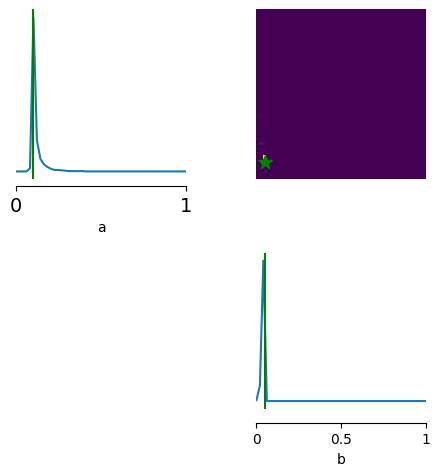
[23]:
limits = [[i, j] for i, j in zip(prior_min, prior_max)]
fig, ax = pairplot(
samples,
points=[list(theta_true.values())],
figsize=(5, 5),
limits=limits,
labels=["a", "b"],
upper="kde",
diag="kde",
fig_kwargs=dict(
points_offdiag=dict(marker="*", markersize=10),
points_colors=["g"],
),
)
ax[0, 0].tick_params(labelsize=14)
ax[0, 0].margins(y=0)
plt.tight_layout()
[ ]: